> For the complete documentation index, see [llms.txt](https://docs.holybro.com/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://docs.holybro.com/radio/sik-telemetry-radio-v3/multiple-point-to-point-setup-with-sik-radio.md).
# Multiple Point to Point Setup with Sik Radio
## Telemetry Radio Setup
You can use multiple Point to Point telemetry modules with the Holybro SiK Telemetry Radio V3.
### Sample Wiring Diagram
{% hint style="info" %}
Note that the above Diagram shows RTK connection, but the telemetry connections apply to normal GPS as well.
{% endhint %}
## Flight Controller setup
### Mission Planner Configuration
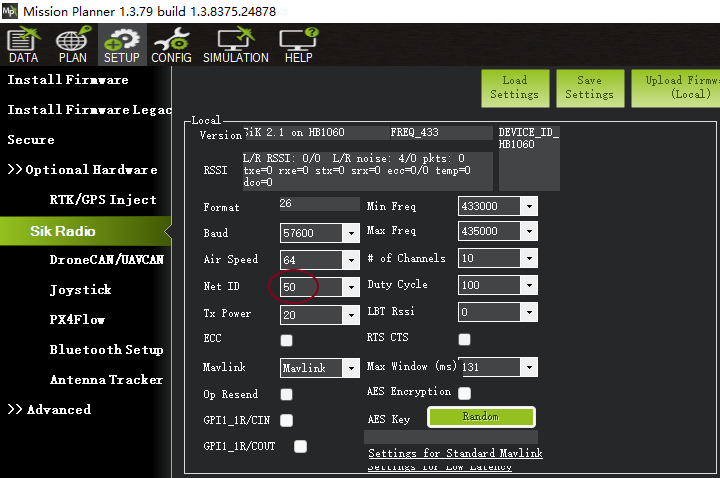
Telemetry Radio V3 configuration:
Set a different Net ID for each pair of Telemetry Radio V3, as shown below
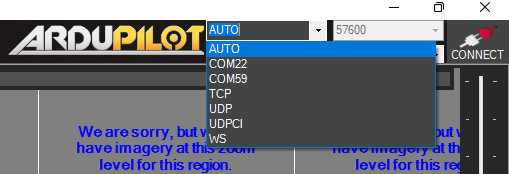
Connect all telemetry modules to the computer via USB hub.
Open Mission Planner to locate the base then connect it with flight controllers. Select AUTO connecting as shown below. All recognized flight controllers on the ports will be connected.
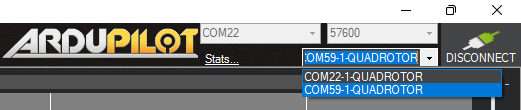
You may select the UAV form the dropdown list below:
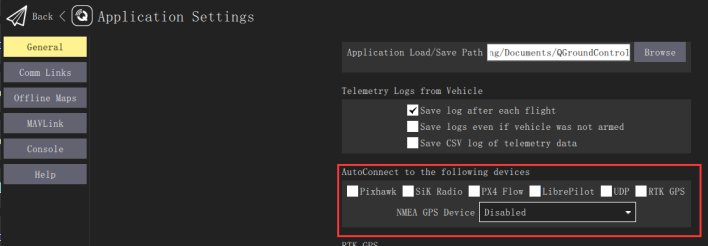
### QGC Ground station configuration:
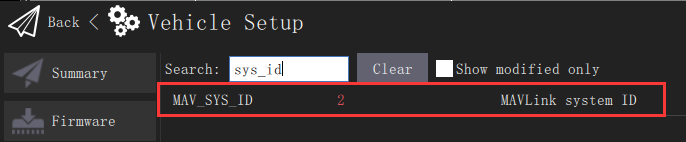
1. Connect the flight controller via USB and set an ID for each flight controller that is different from other flight controllers.
2. Turn off auto connect in QGC
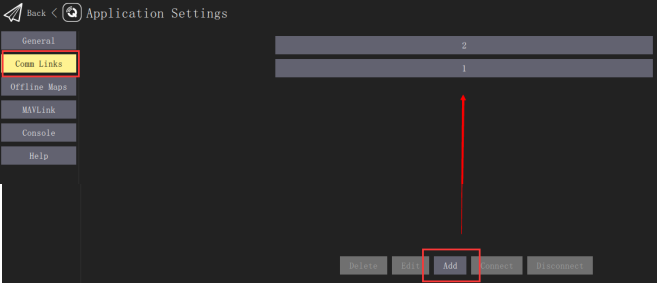
3. Add manual connection
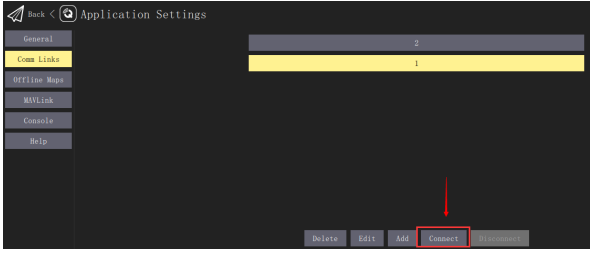
4. Connect all UAV one by one.
5. After the connection is complete, You may select the UAV form the dropdown list below:
#### **Some Tips:**
[**https://ardupilot.org/copter/docs/common-configuring-a-telemetry-radio-using-mission-planner.html**](https://ardupilot.org/copter/docs/common-configuring-a-telemetry-radio-using-mission-planner.html)
---
# Agent Instructions
This documentation is published with GitBook. GitBook is the documentation platform designed so that both humans and AI agents can read, navigate, and reason over technical content effectively. Learn more at gitbook.com.
## Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter, and the optional `goal` query parameter:
```
GET https://docs.holybro.com/radio/sik-telemetry-radio-v3/multiple-point-to-point-setup-with-sik-radio.md?ask=&goal=
```
`ask` is the immediate question: it should be specific, self-contained, and written in natural language.
`goal` is optional and describes the broader end goal you are ultimately trying to accomplish on behalf of the user. GitBook uses it to tailor the answer towards what is most useful for that goal.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.